Медицинская и биологическая физика: учебник / А. Н. Ремизов. - 4-е изд., испр. и перераб. - 2012. - 648 с. : ил.
|
|
|
|
Глава 6. Некоторые вопросы биомеханики
Биомеханикой называют раздел биофизики, в котором рассматриваются механические свойства живых тканей и органов, а также механические явления, происходящие как с целым организмом, так и с отдельными его органами. Говоря кратко, биомеханика - это механика живых систем.
6.1. СОЧЛЕНЕНИЯ И РЫЧАГИ В ОПОРНО-ДВИГАТЕЛЬНОМ АППАРАТЕ ЧЕЛОВЕКА
Движущиеся части механизмов обычно соединены с другими подвижными или неподвижными частями. Подвижное соединение нескольких звеньев образует кинематическую связь. Тело человека - пример кинематической связи.
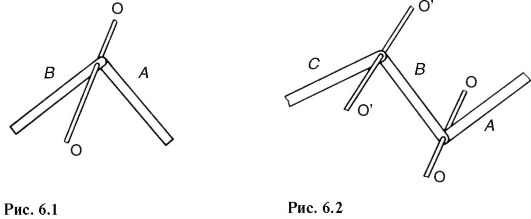
Рассмотрим систему из двух звеньев А и В, соединенных осью ОО (рис. 6.1). Это одноосное двухзвенное соединение. При неподвижном звене В звено А имеет одну степень свободы как тело, вращающееся вокруг неподвижной оси.
Примерами одноосного сочленения в организме человека являются плечелоктевое, надпяточное и фаланговые соединения. Они допускают только возможность сгибания и разгибания с одной степенью свободы. Увеличим двухзвенную систему на одно звено с осью О'О', параллельной оси ОО (рис. 6.2). При неподвижном звене С все точки звена В обладают одной степенью свободы, в том числе и ось ОО, которая может перемещаться по окружности. Звено же А, вращаясь вокруг ОО, имеет еще одну степень.
Таким образом, в одноосной трехзвенной системе1 закрепленное звено не имеет свободы перемещения, второе звено имеет одну степень свободы и третье - две. Фаланги пальцев соединены суставами, представляющими одноосные соединения. Ногтевая фаланга имеет две степени свободы относительно основной и одну степень относительно средней.
1 Понятие «одноосная система» характеризует не число осей, которых может быть несколько, а одно направление всех осей.
Двухосное соединение допускает вращение звеньев по двум взаимно перпендикулярным осям (см. рис. 5.19). Оно имеет две степени свободы вращения. Такое двухосное соединение осуществляется в организме человека двумя близко расположенными сочленениями: атлантозатылоч-ным и эпистрофо-атлантовым. Первое сочленение имеет горизонтальную ось, направленную от правого плеча к левому. Оно осуществляет вращение черепа вперед и назад. Эпистроф - примыкающий к атланту шейный позвонок - имеет маленький цилиндрический шип, который образует с кольцом атланта одноосное цилиндрическое сочленение с вертикальной осью. Это сочленение обеспечивает вращение головы вокруг вертикальной оси.
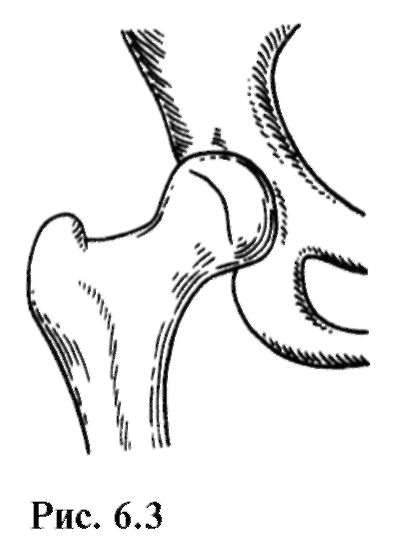
Трехосное соединение осуществляет вращение вокруг трех взаимно перпендикулярных осей. Пример такого соединения дан на рис. 5.20 (шаровой шарнир). Это соединение имеет три степени свободы вращения. Шаровой шарнир осуществлен в тазобедренном суставе человека. Сочленовая впадина таза имеет форму почти правильного полушария. Соответственную форму имеет и головка бедренной кости, входящая во впадину (рис. 6.3).
Присоединение новых звеньев увеличивает кинематическую подвижность. Так, например, череп благодаря некоторой подвижности межпозвоночных суставов (правда, довольно ограниченной) имеет все шесть степеней свободы.
Опорно-двигательная система человека, состоящая из сочлененных между собой костей скелета и мышц, представляет с точки зрения физики совокупность рычагов, удерживаемых человеком в равновесии.
В анатомии различают рычаги силы, в которых происходит выигрыш в силе, но проигрыш в перемещении, и рычаги скорости, в которых, проигрывая в силе, выигрывают в скорости перемещения. Хорошим примером рычага скорости является нижняя челюсть. Действующая сила осуществляется жевательной мышцей. Противодействующая сила - сопротивление раздавливаемой пищи - действует на зубы. Плечо действующей силы значительно короче, чем у сил противодействия, поэтому жевательная мышца короткая и сильная. Когда надо разгрызть что-либо твердое, человек действует коренными зубами, при этом уменьшается плечо силы сопротивления.
Если рассматривать скелет как совокупность отдельных звеньев, соединенных в один организм, то окажется, что все эти звенья при нормальной стойке образуют систему, находящуюся в крайне неустойчивом равновесии. Так, опора туловища представлена шаровыми поверхностями тазобедренного сочленения. Центр масс туловища расположен выше опоры, что при шаровой опоре создает неустойчивое равновесие. То же относится и к коленному соединению, и к голеностопному. Все эти звенья находятся в состоянии неустойчивого равновесия.
Центр масс тела человека расположен при нормальной стойке как раз на одной вертикали с центрами тазобедренного, коленного и голеностопного сочленений ноги, на 2-2,5 см ниже мыса крестца и на 4-5 см выше тазобедренной оси. Таким образом, это самое неустойчивое состояние нагроможденных звеньев скелета. И если вся система держится в равновесии, то только благодаря постоянному напряжению поддерживающих систему мышц.
6.2. МЕХАНИЧЕСКАЯ РАБОТА ЧЕЛОВЕКА. ЭРГОМЕТРИЯ
Механическая работа, которую способен совершить человек в течение дня, зависит от многих факторов, поэтому трудно указать какую-либо предельную величину.
Это замечание относится и к мощности. Так, при кратковременных усилиях человек может развивать мощность порядка нескольких киловатт. Если спортсмен массой 70 кг подпрыгивает с места так, что его центр масс поднимается на 1 м по отношению к нормальной стойке, а фаза отталкивания длится 0,2 с, то он развивает мощность около
3,5 кВт.
При ходьбе человек совершает работу, так как при этом энергия затрачивается на периодическое небольшое поднятие тела и на ускорение и замедление конечностей, главным образом ног.
Работу, которая идет на изменение кинетической энергии конечностей, можно вычислить, используя формулу (5.32). Человек массой 75 кг при ходьбе со скоростью 5 км/ч развивает мощность около 60 Вт. С возрастанием скорости эта мощность быстро увеличивается, достигая 200 Вт при скорости 7 км/ч. При езде на велосипеде положение центра масс человека изменяется гораздо меньше, чем при ходьбе, а ускорение ног тоже меньше. Поэтому мощность, затрачиваемая при езде на велосипеде, значительно меньше: 30 Вт при скорости 9 км/ч, 120 Вт при 18 км/ч.
Работа обращается в нуль, если перемещения нет. Поэтому, когда груз находится на опоре или подставке, или подвешен на нити, сила тяжести не совершает работы. Однако каждому из нас знакома усталость мышц руки и плеча, если держать неподвижно на вытянутой руке гирю или гантель. Точно так же устают мышцы спины и поясничной области, если сидящему человеку поместить на спину груз. В обоих случаях груз неподвижен и работы нет. Усталость же свидетельствует том, что мышцы совершают работу. Такую работу называют статической работой мышц.
Статики (неподвижности) такой, как ее понимают в механике, на самом деле нет. Происходят очень мелкие и частые, незаметные глазу сокращения и расслабления, и при этом совершается работа против сил тяжести. Таким образом, статическая работа человека на самом деле является обычной динамической работой. Для измерения работы человека применяют приборы, называемые эргометрами. Соответствующий раздел измерительной техники называется эргометрией.
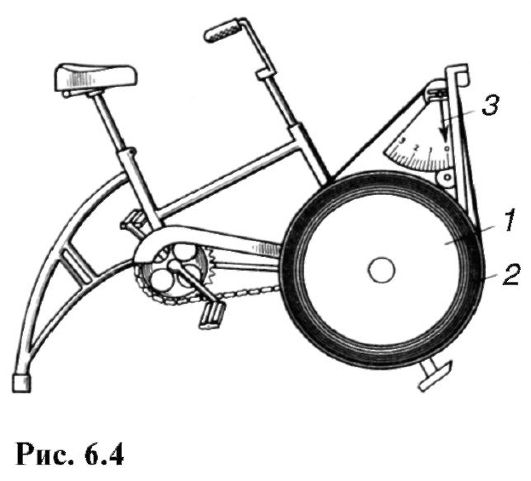
Примером эргометра служит тормозной велосипед (велоэргометр; рис. 6.4). Через обод вращающегося колеса 1 перекинута стальная лента 2. Сила трения между лентой и ободом колеса измеряется динамометром 3. Вся работа испытуемого затрачивается на преодоление силы трения (остальными видами работ пренебрегаем). Умножив длину окружности колеса на силу трения, найдем работу, совершаемую при каждом обороте, а зная число оборотов и время испытания, определим полную работу и среднюю мощность.
6.3. ПЕРЕГРУЗКА И НЕВЕСОМОСТЬ
В обычных условиях на человека действуют сила тяжести и сила реакция опоры. При отсутствии ускорения эти силы равны и противоположно направлены. Такое состояние естественно для человека.
При ускоренном движении системы могут возникнуть особые состояния, называемые перегрузками и невесомостью.
Рассмотрим некоторые примеры.
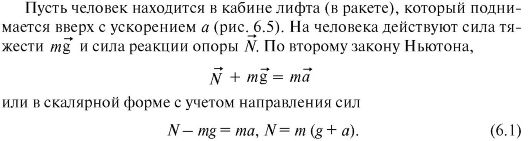
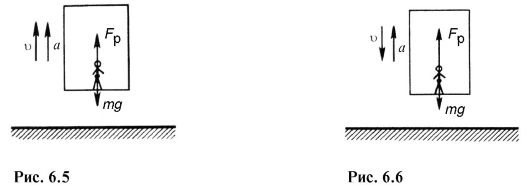
В этом случае сила реакции опоры больше силы тяжести (N > mg) и возникают перегрузки. Так, если a=g, то N=2mg (двукратная перегрузка), если a=2g, то N=3mg (трехкратная перегрузка), и т.д. Перегрузка выражается отношением η =N/(mg).
Другой пример: человек находится в кабине лифта (внутри спускаемого космического аппарата), который замедленно, т.е. с торможением, опускается вниз (рис. 6.6). Направления сил и ускорения соответствуют предыдущему примеру, поэтому и в этом случае получаем формулу (6.1). Человек испытывает перегрузки.
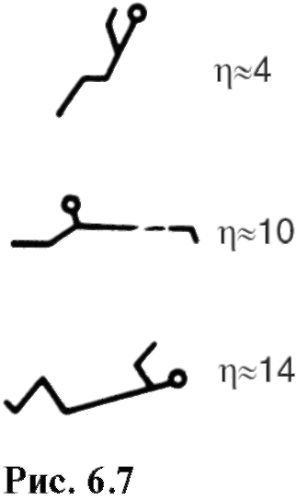
Перегрузки могут оказывать существенное влияние на организм человека, так как в этих состояниях происходит отток крови, изменяется взаимное давление внутренних органов друг на друга, возникает их деформация и т.п. Поэтому человек способен выдерживать лишь ограниченные перегрузки. На рис. 6.7 схематически показаны положения
тела и приведены соответствующие значения перегрузок, которые может в течение по крайней мере нескольких минут выносить здоровый человеческий организм без каких-либо серьезных нарушений.
В космической медицине для тренировки людей к перегрузкам, а также при подобных экспериментах на животных используются большие центрифуги. В таких системах (рис. 6.8, а) можно условно представить две опоры: горизонтальную, которая действует на тело с силой N1 = mg, и вертикальную N2, которая сообщает телу центростремительное ускорение и равна mco2r. Результирующая этих двух сил направлена под углом α к горизонтальной плоскости и равна:
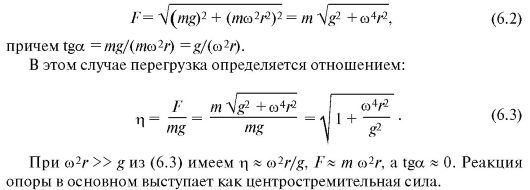
Практически возможно, изменяя наклон кресла, в котором находится испытуемый на центрифуге, всегда сделать так, чтобы сила F была перпендикулярна опоре (рис. 6.8, б).
Если лифт (или космический корабль) ускоренно движется вниз (рис. 6.9) или замедленно вверх, то

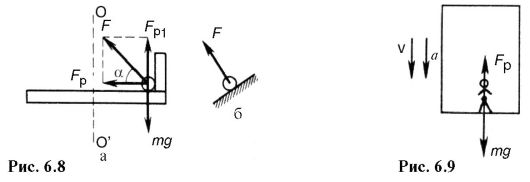
Как видно, реакция опоры меньше силы тяжести: N< mg. Если a = g, то N = 0 - состояние невесомости. Это такое состояние, при котором действующие на систему внешние силы не вызывают взаимных давлений частиц системы друг на друга.
Для биологических объектов невесомость - необычное состояние, хотя и в обыденной жизни встречаются кратковременные периоды частичной невесомости: прыжки, качели, начало движения вниз скоростного лифта и т.п.
Отсутствие действия опоры при невесомости приводит к общей де-тренированности и связанного с этим снижения работоспособности, уменьшается мышечная масса, происходит деминерализация костной ткани. Поэтому космонавтам в условиях невесомости приходится проводить специальные тренировочные физические упражнения или носить особые костюмы, которые, затрудняя движение, позволяют догружать работу мышц.
В обычных условиях гидростатическое давление pgh крови в верхней части тела меньше, чем в нижней. В невесомости кровь равномерно распределяется в организме; это означает, что верхняя часть тела переполнена кровью по сравнению с обычным состоянием, ощущается тяжесть в голове, появляется отечность лица.
Вестибулярный аппарат (см. 6.4) на невесомость будет реагировать так, как будто отсутствует гравитационное поле, возникнут вестибулярные расстройства.
Рассмотрим подробнее особенности движения тела человека в условиях невесомости.
Практическое освоение человеком законов механики происходит с раннего детства: мы учимся сидеть, стоять, ходить, бегать, совершать физические упражнения, работать, кататься на велосипеде и т.п. Все это постигается нами в основном без теоретических знаний соответствующих законов. Человек привыкает к бессознательному совершению механических действий. Так, при толкании ядра человек инстинктивно упирается ногой, чтобы не упасть при «отдаче»; ударяя молотком, рабочий непроизвольно напрягает мышцы, препятствующие вращению корпуса, и т.д.
Парадоксально, но человек настолько привыкает к законам механики, что начинает замечать их проявление только в особых, редких и малопривычных случаях.
К таким особенностям и практически важным проявлениям законов механики относится двигательная деятельность человека в условиях невесомости, или, как принято говорить, в безопорном пространстве. Нетрудно подсчитать, пользуясь законом сохранения импульса, что если
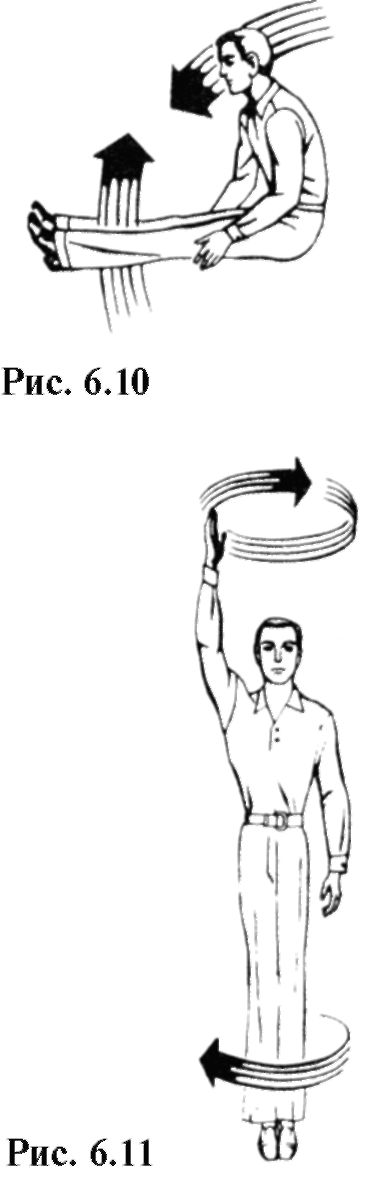
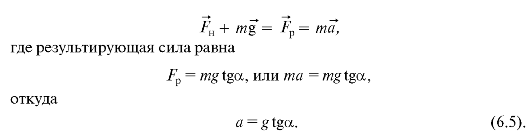
человек массой 100 кг в состоянии невесомости бросит тело массой 0,1 кг со скоростью 3 м/с, то сам он начинает двигаться в противоположную сторону со скоростью 0,3 см/с. Если бросок сделать с размахом руки, то тело человека начнет вращаться. Таково необычное по сравнению с земными условиями проявление законов сохранения импульса и момента импульса. Остановиться человек сможет, только взаимодействуя с другими телами. Если человек в состоянии невесомости захочет сделать упражнение «угол», которое достаточно четко выполняют гимнасты в обычных условиях, то движение ног вызовет в соответствии с законом сохранения момента импульса встречное вращение корпуса (рис. 6.10). Поворот корпуса в условиях невесомости, в том числе и при свободном падении, совершают путем вращения конечностями. Так, например, конусообразные вращательные движения рукой над головой вызовут вращение корпуса вокруг оси симметрии (рис. 6.11).
Если в условиях невесомости человек будет завинчивать гайку, то он сам начнет вращаться в противоположном направлении.
В условиях невесомости действуют те же известные законы Ньютона, но в силу необычности условий человек должен «привыкать» к движениям в невесомости. Резкие движения головой, руками или ногами, отбрасывание каких-либо предметов могут существенно изменить движение тела человека.
Это учитывается космонавтами как при подготовке к космическим полетам, так и во время полета. Первый человек планеты, вышедший в открытый космос, А.А. Леонов пишет в своей книге, что «...после некоторой подготовки человек сможет даже при безопорном «плавании» в невесомости быстро и точно ориентировать свое тело в любом направлении исключительно за счет мышечных усилий, не прибегая к помощи технических средств. И далее: «По-видимому, в невесомости при наличии самой незначительной точки опоры можно выполнять любые работы без заметных нарушений координации движений!»1
1 Леонов А.А., Лебедев В.И. Психологические особенности деятельности космонавтов. - М., 1971. - С. 215, 217.
6.4. ВЕСТИБУЛЯРНЫЙ аппарат как ИНЕРЦИАЛЬНАЯ СИСТЕМА ОРИЕНТАЦИИ
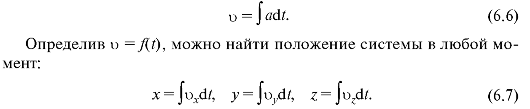
В обычных условиях положение свободно подвешенного маятника указывает направление силы тяжести (рис. 6.12, а). Если маятник связан с ускоренно движущейся системой отсчета (неинерциальная система отсчета), то его положение зависит от ускорения системы (рис. 6.12, б). Как следует из рисунка, по второму закону Ньютона:
Следовательно, даже простой математический маятник в принципе может быть использован для определения модуля и направления ускорения системы.
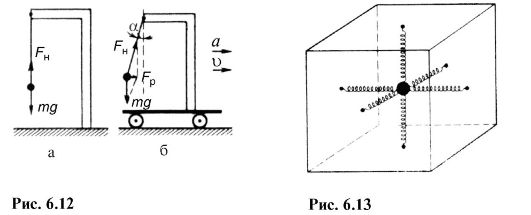
Более удобным индикатором ускорения системы является устройство, изображенное на рис. 6.13, - тело известной массы укреплено на шести пружинках. По деформации пружин можно определить значение и направление силы, действующей на тело, а отсюда и ускорение системы, если учесть ускорение свободного падения. Такого рода индикаторы используются в инерциальной навигации, получившей развитие в связи с решением космических задач.
В самом деле, если известно ускорение системы, например ракеты, в каждый момент времени, то можно найти зависимость скорости от времени:
Таким образом, можно без помощи средств, находящихся вне ракеты, автономно установить ее местоположение, скорость и ускорение в любой момент времени.
Соответствующие устройства называются инерциальными системами ориентации.
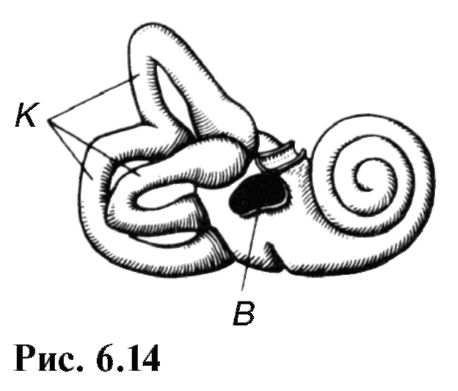
В человеческом организме имеется орган, который тоже, по существу, является инерциальной системой ориентации, - это вестибулярный аппарат1. Он расположен во внутреннем ухе и состоит из трех взаимно перпендикулярных полукружных каналов К и полости - преддверия В (рис. 6.14). На внутренней поверхности стенок преддверия и в части полукружных каналов находятся группы чувствительных нервных клеток, имеющих свободные окончания в форме волосков. Внутри преддверия и полукружных каналов есть студенистая масса (эндолим-фа), содержащая мелкие кристаллы фосфорнокислого и углекислого кальция (отолиты). Ускоренное перемещение головы вызывает перемещение эндолимфы и отолитов, что воспринимается нервными клетками (через волоски). Вестибулярный аппарат, как и любая другая физическая система, не отличает гравитационное воздействие от воздействий, возникающих при ускоренном движении системы.
Наш организм приспособился к действию силы тяжести; соответствующую привычную информацию клетки вестибулярного аппарата сообщают в мозг, поэтому состояния невесомости и перегрузок воспринимаются нами посредством вестибулярного аппарата (и других органов) как необычные состояния, к которым необходимо приспособиться. Если оказывается периодическое воздействие на вестибулярный аппарат человека, например при качке корабля, то это может привести организм в особое состояние, называемое морской болезнью.
1 От системы, изображенной на рис. 6.13, вестибулярный аппарат принципиально отличается тем, что не способен количественно определить ускорение человека. Это обстоятельство не позволяет человеку, едущему в закрытой кабине машины, определить местонахождение автомобиля.