Медицинская и биологическая физика: учебник / А. Н. Ремизов. - 4-е изд., испр. и перераб. - 2012. - 648 с. : ил.
|
|
|
|
Глава 4. Основы кибернетики
Кибернетикой называют науку об управлении, связи и переработке информации.
Годом рождения современной кибернетики считается 1948 год, когда американский математик Н.Винер опубликовал труд «Кибернетика, или управление и связь в живых организмах и машинах». Кибернетика изучает общие свойства различных систем управления вне зависимости от их материальной основы. Эти свойства имеют место в живой природе, технике и в коллективах людей.
4.1. КИБЕРНЕТИКА И ДРУГИЕ НАУКИ
Читатель в общих чертах знает предмет многих естественных, общественных и технических наук, таких, как физика, математика, химия, биология, биофизика, история, электротехника и т.д. Среди этих наук особое положение занимает математика - наука, в которой изучаются пространственные формы и количественные отношения действительного мира. Исключительность этой науки в том, что она является инструментом познания в любой отрасли человеческого знания. Все науки, как уже отмечалось, развиваются, используя в той или иной степени математические закономерности. Подобное можно отнести и к кибернетике.
Винер увидел во многих разных науках общие вопросы и черты. Управление осуществляется в обществе, во многих технических системах, в живом организме. Информация перерабатывается людьми, вычислительными машинами, в биологических системах, она передается по проводной линии, радиоканалу, невральным структурам.
На базе многих наук и появилась кибернетика. Все перечислить невозможно, но несомненно влияние техники, математики (теория автоматического регулирования, математическая логика, теория информации и связи, вычислительные машины и др.) и физиологии (учение об условных рефлексах, принцип обратной афферентации, теория функциональных систем и др.).
Схематично место кибернетики в системе наук показано на рис. 4.1.
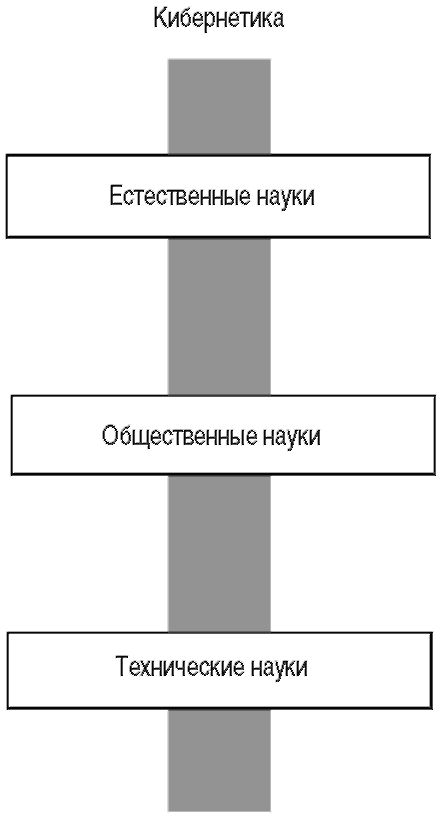
Рис. 4.1
Интересно отметить, что появление новых наук на базе комплекса существующих продолжается и сейчас. В качестве примера можно указать синергетику - область научных исследований, целью которых является выявление общих закономерностей в процессах образования, устойчивости и разрушения упорядоченных временных и пространственных структур в сложных системах различной природы (физической, химической, биологической и др.).
В развитие и создание кибернетики прямой или косвенный вклад внесли многие русские и советские ученые. Среди них физиологи и медики И.М. Сеченов (1829-1905), И.П. Павлов (1849 - 1936), А.А. Богданов (1873 - 1928), П.К. Анохин (1898-1974), В.В. Парин (1903- 1971), Н.М. Амосов (р. 1913), техники разных направлений и математики И.А. Вышне-градский (1831 - 1895), А.М.Ляпунов (1857- 1918), А.И. Берг (1893-1979), С.А. Лебедев (1902-1974), А.Н. Колмогоров 71903-1987), А.А. Харкевич (1904-1965), В.А. Котельников (р. 1908), Л.В. Канторович (1912-1986), В.М. Глушков (1923-1982) и др.
4.2. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ
Кибернетической системой называют упорядоченную совокупность объектов (элементов системы), взаимодействующих и взаимосвязанных между собой, которые способны воспринимать, запоминать и перерабатывать информацию, а также обмениваться информацией.
Примерами кибернетических систем являются коллективы людей, мозг, вычислительные машины, автоматы. Соответственно этому элементами кибернетической системы могут быть объекты разной физической природы: человек, клетки мозга, блоки вычислительной машины и т.д.
Состояние элементов системы описывается некоторым множеством параметров, которые подразделяются на непрерывные, принимающие любые вещественные значения в некотором интервале, и дискретные, принимающие конечные множества значений. Так, например, температура тела человека - непрерывный параметр, а его пол - дискретный параметр. В общем случае состояние элемента кибернетической систе-
мы может изменяться и зависит как от самого элемента, так и от воздействия окружающих элементов и внешней среды.
Структура кибернетической системы определяется организацией связей между элементами системы и является функцией состояний самих элементов и внешних воздействий.
Функционирование кибернетической системы описывается тремя семействами функций: функциями, которые учитывают изменение состояний элементов системы, функциями, вызывающими изменения в структуре системы, в том числе вследствие внешнего воздействия, и функциями, определяющими сигналы, передаваемые системой за ее пределы. Для более полного описания системы следует еще учесть ее начальное состояние.
Кибернетические системы различаются по своей сложности, степени определенности и уровню организации.
Сложность системы зависит от количества элементов, ее составляющих, от сложности структуры и разнообразия внутренних связей. Существуют сложные кибернетические системы, которые однако, могут быть детально известны, так как являются созданием человека. Вместе с тем такие сложные кибернетические системы, как биологические, благодаря многочисленным и неясным многообразным связям между множеством элементов во многих случаях детальному описанию не поддаются. При исследовании сложных систем имеет место и процесс, обратный разделению системы на элементы: системы представляются в виде укрупненных блоков, каждый из которых сам является системой. Таким образом, сложные системы могут состоять из более простых. Система более высокого уровня представляет собой объединение подсистем более низкого уровня, т.е. организация системы имеет иерархический характер.
Между уровнями иерархии могут возникать взаимосвязи. Само понятие элементов в этом смысле является относительным. В различных случаях одна и та же часть системы может быть и элементом, и блоком, и всей системой. Так, например, при изучении функций мозга его можно рассматривать как элемент, тогда как при изучении работы мозга в связи с его внутренним строением за элемент следует принимать отдельные нейроны. В свою очередь, нейрон будет кибернетической системой при изучении его с учетом клеточного строения.
Кибернетические системы делятся на непрерывные и дискретные. В непрерывных системах все сигналы, циркулирующие в системе, и состояния элементов задаются непрерывными параметрами, в дискретных - дискретными. Существуют, однако, и смешанные (гибридные)
системы, в которых имеются параметры обоих видов. Деление систем на непрерывные и дискретные является условным и определяется необходимой степенью точности исследуемого процесса и техническими и математическими удобствами. Некоторые процессы или величины, имеющие дискретную природу, например электрический ток (дискретность электрического заряда: не может быть заряд меньше, чем заряд электрона), удобно описывать непрерывными величинами. В других случаях, наоборот, непрерывный процесс имеет смысл описывать дискретными параметрами. Так, например, непрерывную выделительную функцию почек удобно описывать дискретной пятибалльной характеристикой. Кроме того, при любых физических измерениях, производя их через определенные интервалы времени, фактически получают набор дискретных величин. Все сказанное свидетельствует, что дискретные системы являются более универсальными, чем непрерывные.
При исследовании непрерывных систем применяют аппарат дифференциальных уравнений, при исследовании дискретных систем - теорию алгоритмов.
В кибернетике и технике принято деление систем на детерминированные и вероятностные. Детерминированной называют такую систему, элементы которой взаимодействуют определенным образом. Состояние и поведение такой системы предсказывается однозначно и описывается однозначными функциями. Поведение вероятностных систем можно определить с некоторой долей достоверности, так как элементы системы находятся под влиянием столь большого числа воздействий, что взаимодействие всех элементов не может быть описано точно. Один из примеров - реакция организма на воздействие физическими факторами (силовое, электрическое, тепловое и др.); она имеет вероятностный характер.
Система называется замкнутой, если ее элементы обмениваются сигналами только между собой. Незамкнутые, или открытые, системы обязательно обмениваются сигналами с внешней средой.
Для восприятия сигналов из внешней среды и передачи их внутрь системы всякая открытая система обладает рецепторами (датчиками или преобразователями). У животных, как у кибернетической системы, реценторами являются органы чувств - осязание, зрение, слух и т.п., у автоматов - датчики: тензометрические, фотоэлектрические, индукционные и т.д. (см. 21.3).
Во внешнюю среду сигналы передаются посредством исполнительных механизмов, называемых эффекторами. Речь, руки, мимика лица являются для человека - кибернетической системы - эффекторами.
Рецептором для автомата с газированной водой является кнопка или приемник монет, эффектором - выдача газированной воды.
Сложные кибернетичечские системы обладают характерным свойством - способностью накапливать информацию, которая впоследствии может быть использована при работе управляющей системы. Это свойство называется, по аналогии с подобным свойством человеческого мозга, памятью. Запоминание в кибернетических системах осуществляется двумя способами: во-первых, вследствие изменения состояния элементов системы, во-вторых, в результате изменения ее структуры.
4.3. ЭЛЕМЕНТЫ ТЕОРИИ ИНФОРМАЦИИ
Центральное место в кибернетике занимает информация. Этот термин уже неоднократно встречался в курсе без специального разъяснения как общепонятным. Слово «информация»1 означает, по современным представлениям, совокупность сведений, данных, передачу сообщений.
Источником информации может служить всякое явление или событие, однако оно должно иметь смысл и являться сигналом к тому или иному действию. Иногда говорят, что информация - система сведений об окружающем нас мире, которые получает человек в результате наблюдения и общения с другими людьми. Люди получают информацию, когда ощущают боль, голод, холод, видят, слышат, разговаривают с другими людьми, читают книги и т.п.
Однако представление о том, что информацию получает только человек, является субъективным. На самом деле это понятие имеет более широкий смысл. Так, непрерывное регулирование работы внутренних органов животных и системы развития растений связано с передачей информации.
Не следует вдаваться и в другую крайность, полагая, что всякое отражение событий в мире является информацией. Вряд ли можно считать, что понижение температуры в горах является для скал информацией о наступлении зимы.
Передача, получение и переработка информации свойственны системам, достаточно сложно организованным, специфическая особенность которых заключается в наличии процессов управления. Замеча-
Informatio (лат.) - разъяснение, осведомление.
тельной особенностью информации является то, что она уничтожает незнание чего-либо, уменьшает неопределенность ситуации.
Научный подход к изучению информации был вызван «информационным взрывом» - лавинообразным потоком информации в результате бурного развития науки и техники в середине XX в.
Понятие информации в кибернетике играет такую же важную роль, как понятие энергии и массы в физике. Раздел кибернетики, посвященный вопросам сбора, передачи, хранения, переработки и вычисления информации, получил название теории информации. Рассмотрим кратко элементы этой теории.
Передача информации осуществляется по каналам связи в виде сигналов, вырабатываемых органами кибернетической системы. Каналом связи называется среда, по которой передаются сигналы. При устном разговоре сигналом является речь, а каналом связи - воздух, при радиопередаче музыки сигналом является звук, а каналами связи - электромагнитное поле и воздух.
Физическим носителем сигнала могут быть всевозможные виды материи, которые при передаче одного сигнала могут чередоваться. Например, при радиопередаче мысль, выражаемая словом, переданная за счет биоэлектрических импульсов голосовым мышцам, вызывая их сокращения, создает звуковой образ, который в результате колебания мембраны в микрофоне преобразуется в электрический импульс - сигнал, передаваемый на расстояние. При этом сигналы должны удовлетворять требованиям изоморфизма. Под изоморфизмом понимают такое соответствие физически различных явлений, при котором сохраняется, не искажается содержание передаваемого сообщения.
Нарушение изоморфизма приводит к искажению информации. Искажение сигналов как вследствие нарушения изоморфизма, так и в результате внешних помех называют шумом.
В зависимости от значения передаваемых сигналов их делят на осведомительные, сообщающие какую-либо информацию, и исполнительные, которые заключают какую-либо команду к действию. Различают сигналы дискретные и непрерывные. Примером дискретного сигнала является передача азбукой Морзе или передача цифр импульсами тока, примером непрерывного - изменение напряжения в цепи, соответствующее изменению температуры.
Всякое сообщение состоит из комбинации простых сигналов определенной физической природы. Полный набор таких сигналов называют алфавитом, один сигнал - буквой алфавита. Для передачи сообщения его следует описать с помощью какого-либо алфавита, иначе говоря, за-
кодировать. Кодированием называется описание какого-либо сообщения с помощью определенного алфавита, т.е. установление однозначного соответствия между параметрами, характеризующими сигнал, и информацией. Перевод этого сообщения на другой алфавит называется перекодированием, расшифровка сообщения - декодированием.
Для передачи сообщений в хозяйственной и научной жизни кодирование производится человеком. Однако природой созданы естественные способы кодирования. Эти способы представляют огромный интерес для науки, например изучение способа кодирования наследственной информации о взрослом организме в зародышевой клетке. Применение кодирования позволяет использовать небольшой алфавит для передачи огромной информации. Оказалось, что любую информацию можно закодировать с помощью двух знаков (0,1). Такой код называется двоичным.
Передача любого сигнала связана с затратой энергии, однако количество передаваемой информации и тем более ее смысл не зависят от энергии сигнала. Более того, очень часто сигнал малой энергии передает сообщение, в результате которого может быть вызван процесс, связанный с огромной затратой энергии. Например, атомный взрыв может быть вызван нажатием кнопки-включателя соответствующего устройства, спокойная информация о чьем-либо неприглядном поступке может вызвать взрыв негодования.
В кибернетике неважно, какая энергия затрачена для передачи информации, но существенно, какое количество информации будет передано или можно передать по тому или иному каналу связи. Для количественного подсчета информации следует отвлечься от смысла сообщения, аналогично тому, как для решения арифметического примера отвлекаются от конкретных предметов. Складывая, например 2 и 3, получаем 5, при этом несущественно, какие предметы складываем: яблоки, ракеты или звезды.
Как же вычисляется количество информации? Уже отмечалось, что информация тогда имеет смысл, когда она уменьшает степень незнания, т.е. процесс извлечения информации связан с увеличением определенности наших сведений об объекте. Сообщение несет информацию, если из совокупности реально возможных событий указывается некоторое определенное.
Например, читая историю болезни, врач получает информацию о болезнях данного пациента: из всего многообразия различных заболеваний выделены только те, которые перенес данный больной. Сообщение об уже известном не несет информации; так, для грамотного человека
не содержит информации утверждение, что после 15-го числа месяца наступает 16-е.
Чем больше различных возможностей имеет событие, тем большую информацию о нем несет сообщение. Так, при однократном бросании игральной кости (6 граней) получают большую информацию, чем при бросании монеты (2 стороны), ибо первый случай имеет большее число равновозможных исходов, чем второй. Говорят, что количество информации изменяется в отношении, обратном вероятности.
Так как мерой неопределенности каких-либо событий является вероятность, то следует предположить, что количественная оценка информации связана с основными представлениями теории вероятностей. Действительно, современный метод подсчета информации основан на вероятностном подходе при рассмотрении систем связи и кодирования сообщений.
Рассмотрим метод подсчета количества информации, содержащейся в одном сообщении, предложенный Шенноном и используемый в современной теории информации.
Мера количества информации может быть найдена как изменение степени неопределенности в ожидании некоторого события. Предположим, что имеется k равновероятных исходов события. Тогда очевидно, что степень неопределенности одного события зависит от k: в случае k = 1 предсказание события является достоверным, т.е. степень неопределенности равна нулю; в случае большого k предсказать событие трудно, степень неопределенности велика.
Следовательно, искомая функция f (k) (мера количества информации или изменение степени неопределенности) должна быть равна нулю при k = 1 и при возрастании k возрастать.
Кроме того, функция f должна удовлетворять еще одному условию. Допустим, что проводятся два независимых опыта, один из них имеет k равновероятных исходов, а другой - l. Естественно предположить, что неопределенность f (kl) совместного появления некоторого сочетания событий первого и второго опытов больше f (k) и f (l) и равна сумме неопределенностей исходов каждого из опытов:

В левой части формулы представлена функция f (kl) от произведения kl, равного числу возможных пар сочетаний исходов первого и второго опытов. Формуле (4.1) соответствует логарифмическая функция f (k) - log. k.

Кроме того, полученная функция удовлетворяет условиям loga 1 = 0 и возрастает при увеличении k.
Так как переход от одной системы логарифмов к другой в зависимости от основания сводится к умножению функции loga k на постоянный множитель, то основание логарифмов решающей роли не играет и скажется лишь на выборе единиц количества информации.
Итак, будем считать функцию loga k мерой неопределенности (количество информации) при k равновероятных исходах. Вероятность каждого исхода (события) равна р = р1 = р2 = р3 = ... = pk = 1/k Так как неопределенности различных событий суммируются, то неопределенность каждого отдельного исхода равна

В опыте, имеющем исходы различной вероятности р1, р2, ... pk мера неопределенности каждого отдельного исхода запишется по выражению
(4.3):

а мера неопределенности всего опыта - как сумма этих неопределенностей:

Это среднее значение логарифма вероятности. По аналогии с формулой Больцмана [см. (12.20)], Н называется энтропией или информационной энтропией. Эту величину можно рассматривать как меру информации.
Исследуя на экстремум (4.4), находим, что самой большой неопределенностью обладает событие с равновероятными исходами. Испытание в этом случае дает наибольшую информацию:

В частном случае двух равновозможных событий количество информации, полученной при сообщении, равно

Для выбора единицы количества информации положим а - 2, тогда из (4.6) имеем
H= loga 2 = 1.
Это количество информации принимается за бит (бит - информация, содержащаяся в сообщении об одном из двух равновероятных событий). Принимая в (4.5) а = 2, получаем, что количество информации

выражается в битах.
Посчитаем информацию, полученную при выпадании 1 в случае бросания игральной кости. Используя (4.7), имеем

Понятие информации является одним из важнейших в кибернетике, так как всякий процесс управления связан с получением, накоплением и передачей информации. Отражая общие свойства материального мира, понятие информации выступает как философская категория.
Информационные процессы имеют место при работе любых систем управления - от процессов передачи наследственных признаков до процессов общения между людьми и машинами. Аналогично тому как посредством энергии в физике определяется мера превращения одной формы движения в другую, в кибернетике информация является мерой процессов отражения материального мира.
Как уже отмечалось, информация передается по каналам связи с помощью сигналов. Информация, воспринятая от источника приемными элементами (органами чувств, микрофонами, фотоэлементами и т.п.), преобразуется кодирующим устройством в форму, удобную для передачи сигнала, например в электрический сигнал, и передается по каналу связи к приемнику, в котором информация декодируется, например в звук, и сообщается слушателю. Общая схема системы передачи информации изображена на рис. 4.2.

Рис. 4.2
В заключение отметим, что некоторые количественные выражения теории информации пока еще не нашли приложения в медицинской кибернетике. Это обстоятельство обусловлено общим, пока еще в значительной степени качественным характером медицины.
4.4. УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ
Для того чтобы происходило целенаправленное изменение поведения кибернетической системы, необходимо управление.
Управление - это осуществление воздействия на кибернетическую систему (объект) в соответствии с имеющейся программой или целью ее функционирования. Говоря кратко, управление - это воздействие на объект для достижения заданной цели.
Цели управления могут быть различными. В простейшей случае это, например, просто поддержание постоянным какого-либо параметра (постоянной влажности в помещении, температуры). В более сложных кибернетических системах целью управления являются задачи приспособления к изменяющимся условиям, например приспособление к изменяющейся среде обитания биологического индивидуума.
Установлено, что схема управления объектами различной природы является общей как для органического мира, включая механизмы управления в живом организме и механизмы биологической эволюции, так и для неорганического мира, вплоть до электронно-вычислительных машин и управления космическими кораблями.
Это сходство позволяет проводить аналогии между живыми системами, прошедшими усовершенствование в течение длительного процесса эволюции, и техническими устройствами, более простыми и менее совершенными.
Исследование биологических систем управления и сравнение их с техническими системами, с одной стороны, позволяют найти новые принципы для создания более сложных технических устройств, а с другой стороны, понять принципы управления, которые лежат в основе биологических объектов и процессов. Первая сторона вопроса является содержанием научного направления, получившего название «бионика».
Во всякой системе управления следует различать управляющий орган и объект управления, а также линии связи (каналы связи) между ними. Управляющий орган является весьма важной частью кибернетической системы. Он представляет собой управлющую систему, которая перерабатывает полученную информацию и вырабатывает управляю-
щие воздействия. Процессы переработки информации происходят в различных естественных и искусственных управляющих системах. К ним относятся мышление, переработка информации в автоматизированных системах, изменение наследственной информации в процессе эволюции биологических видов и т.п. Управляющие воздействия передаются через соответствующие эффекторы на объект управления. Связь осуществляется за счет физических процессов, несущих информацию и представляющих собой сигнал. Получив сигнал, объект управления перейдет в соответствующее состояние.
Наиболее интересным является такое управление, при котором операции, обеспечивающие достижения заданной цели управления, выполняются системой, функционирующей без вмешательства человека в соответствии с заранее заданным алгоритмом. Такой вариант называется автоматическим управлением.
Разновидностью автоматического управления является автоматическое регулирование. Этот термин используют в тех случаях, когда цель управления - автоматическое поддержание постоянства или изменения по требуемому закону некоторой физической величины объекта управления (регулирования). Управляющий орган при этом может быть назван регулятором.
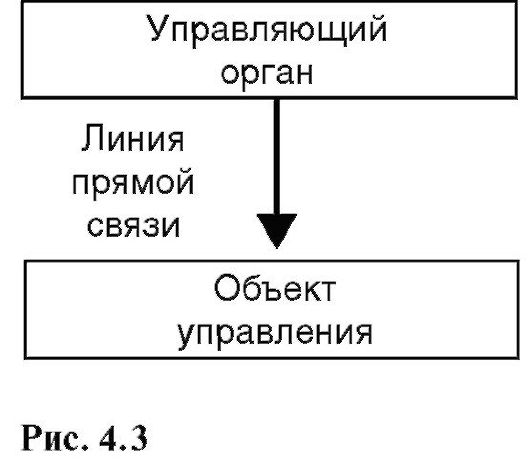
Если управляющая система не получает или не учитывает информацию от объекта управления, она называется разомкнутой. Схематично такое управление показано на рис. 4.3 с указанием канала (линии) прямой связи. Такое управление реализуется в светофоре, генетической системе, ЭВМ.
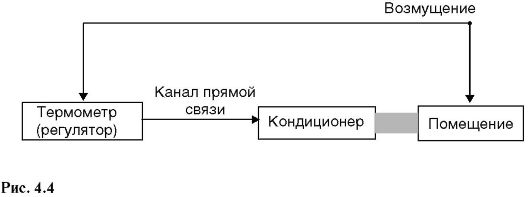
В режиме разомкнутой системы осуществляется автоматическое управление (регулирование) по возмущению. Поясним это примером устройства, автоматически поддерживающего комфортные температурные условия в помещении (рис. 4.4). Здесь объектом регулирования является кондиционер. Возмущение (температура наружного воздуха) воздействует на регулятор (специальный термометр) и оказывает влияние на температуру воздуха в помещении. Термометр в зависимости от возмущения подает сигнал кондиционеру для включения его в работу либо в режиме нагревающего устройства, либо охлаждающего.
Воздух соответствующей температуры поступает в помещение. Существенно,
что в этой системе нагревание или охлаждение воздуха в помещении зависит от температуры окружающей среды, а не от температуры воздуха в помещении.
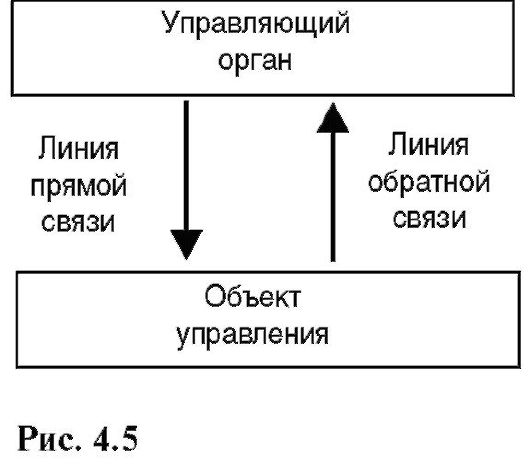
Более распространенными и эффективными являются системы управления с обратной связью - замкнутые системы управления (рис. 4.5). Управляющий орган при этом перерабатывает информацию, полученную как извне от других объектов си-
стемы, так и от объекта управления по линии обратной связи.
Обратной связью называют передачу воздействия или информации с выхода системы (элемента) на ее вход, в частности воздействие объекта управления на управляющий орган.
Различают положительную и отрицательную обратную связь. При положительной обратной связи результаты процесса стремятся усилить его. В технических устройствах положительная обратная связь способствует переходу системы в другое равновесное состояние или вызывает лавинный процесс.
Отрицательная обратная связь препятствует развитию, изменению процесса и стабилизирует его. Отрицательная обратная связь используется в замкнутых системах управления.
В качестве технической системы с отрицательной обратной связью рассмотрим терморегулятор термостата, в котором используется контактный термометр (рис. 4.6).
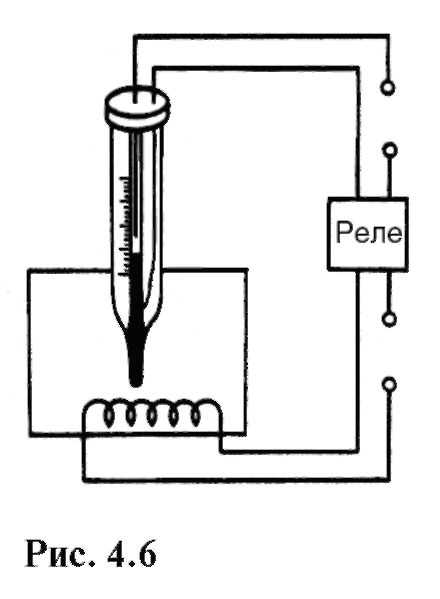
При температуре, ниже заданной, ртутный столбик в термометре разрывает контакт в цепи реле, оно включает нагреватель, и температура повышается. При температуре выше нормы ртутный столбик замыкает цепь реле, и нагреватель отключается. Рассмотренная система позволяет поддерживать в термостате температуру в определенном интервале. Этот пример иллюстрирует автоматическое (регулирование) по отклонению.
К кибернетическим системам с отрицательной обратной связью (замкнутая система управления) относятся самоуправляющиеся
(саморегулируемые) системы. Самоуправляющейся системой является, например, организм животного, в котором самостоятельно поддерживаются постоянный состав крови, температура и другие параметры. Система, состоящая из группы животных и хищников, питающихся ими, например зайцы и волки, также является саморегулируемой. Увеличение поголовья волков приводит к уменьшению количества пищи (зайцев), это, в свою очередь, приводит к уменьшению количества волков, отсюда увеличивается поголовье зайцев, и т.д. В результате, если отвлечься от других факторов (отстрел волков, засуха и пр.), численность волков и зайцев поддерживается в этой системе на некотором определенном уровне.
Схему самоуправляющейся системы такого типа можно представить состоящей из следующих частей (рис. 4.7): объекта управления, который воздействует на внешнюю среду, некоего чувствительного элемента, который получает информацию как от внешней среды, так и в результате изменений, происходящих с объектом управления, и управляющего органа (регулятора). По каналу 1 в регулятор поступает первичная осведомляющая информация, по каналу 2 - управляющая информация

Рис. 4.7
к объекту управления. Через внешнюю среду и чувствительный элемент осуществляется обратная связь.
Изучение самоуправляющихся систем представляет особый интерес для физиологии и биологии.
Существуют системы оптимального управления, целью которых является поддержание экстремального (минимального или максимального) значения некоторой величины в зависимости от внешних условий и управляющих сигналов системы.
Простейшим примером такого регулирования может служить устройство кондиционера, создающего температуру в соответствии с влажностью воздуха. Оптимальная система управления уместна и в тех случаях, когда функция системы сводится к сохранению регулируемых параметров в максимальном или минимальном значении при изменении нерегулируемых параметров.
Более подробно вопросы управления рассматриваются в специальной теории управляющих систем. Основными принципами, положенными в ее основу, являются обратная связь и многоступенчатость управления. Обратная связь позволяет кибернетической системе учитывать реальные обстоятельства и согласовывать их с необходимым поведением. Многоступенчатая схема управления обусловливает надежность и устойчивость кибернетических систем.
4.5. МОДЕЛИРОВАНИЕ
В различных областях знаний для исследования реальных систем и процессов используются модели.
Модель - это объект любой природы, умозрительный или материально реализованный, который воспроизводит явление, процесс или систему с целью их исследования или изучения. Метод исследования явлений, процессов и систем, основанный на построении и изучении их моделей, получил название моделирования.
Таким образом, под моделированием в настоящее время понимают не только предметное, копирующее моделирование типа создания модели планера, но и научный метод исследования и познания глубокой сущности явления и объектов. Основой моделирования является единство материального мира и атрибутов материи - пространства и времени, а также принципов движения материи.
В кибернетике моделирование - основной метод научного познания. Это обусловлено абстрактностью кибернетики, общностью струк-
туры кибернетических систем и систем управления разной природы. По существу схемы, приведенные на рис. 4.3-4.7, являются простыми моделями разных систем управления. Вопросы моделирования в этом параграфе рассматривают шире рамок кибернетики, учитывая универсальность этого метода и медико-биологическую направленность интересов читателя.
Остановимся на основных, наиболее существенных разновидностях моделей: геометрические, биологические, физические (физико-химические) и математические.
Геометрические модели - наиболее простая их разновидность. Это внешнее копирование оригинала. Муляжи, используемые в преподавании анатомии, биологии и физиологии, являются геометрическими моделями. В быту геометрические модели часто используются с познавательной или декоративно-развлекательной целью (модели автомашин, железной дороги, зданий, куклы и т.п.).
Создание биологических (физиологических) моделей основано на воспроизведении в лабораторных условиях определенных состояний, например заболевания у подопытных животных. В эксперименте изучаются механизмы возникновения состояния, его течение, способы воздействия на организм для его изменения. К таким моделям относят искусственно вызванные инфекционные процессы, гипертрофирование органов, генетические нарушения, злокачественные новообразования, искусственно созданные неврозы и различные эмоциональные состояния.
Для создания этих моделей на подопытный организм производятся самые различные воздействия: заражение микробами, введение гормонов, изменение состава пищи, воздействие на периферическую нервную систему, изменение условий и среды обитаний и пр.
Биологические модели важны для биологии, физиологии, фармакологии и генетики.
Создание физических и физико-химических моделей основано на воспроизведении физическими и химическими способами биологических структур, функций или процессов. Физико-химические модели более идеализированы, чем биологические, и представляют собой далекое подобие моделируемого биологического объекта.
В качестве примера одной из первых физико-химических моделей можно привести модель роста живой клетки (1867), в которой рост имитировался выращиванием кристаллов CuSO4 в водном растворе Си [Fe(CN)6J. Эта простая модель основана лишь на внешнем, главным образом качественном, подобии модели натуре.
Модели, основанные на количественном подобии, более сложны и строятся во многих случаях на принципах электротехники и электроники с использованием экспериментального материала по электрофизиологии.
Разработанные модели используются при построении механических машин с электронным управлением, имитирующих некоторые акты поведения животных (образование условного рефлекса, памяти, торможения и т.п.). Для эффекта наглядности этим машинам часто придают внешний вид животных: мыши, черепахи, белки.
Важным в практическом отношении является моделирование физико-химических условий обитания отдельных клеток, органов или всего организма в целом. Созданные искусственно растворы имитируют среду, поддерживающую существование вне организма отдельных органов и клеток.
Искусственные биологические мембраны позволяют изучать физико-химическую природу их проницаемости для ионов и влияние на нее различных внешних факторов.
Математическое моделирование биологических объектов представляет собой аналитическое описание идеализированных процессов и систем, адекватных реальным.
Идеальных систем и процессов в природе не существует, однако полученные результаты в известных пределах можно применять к реальным процессам и системам, так как они имеют общие свойства с идеальными. Подобный метод абстракций используется и в физике.
Математические модели строятся либо на основе экспериментальных данных (материальное, или предметное, моделирование), либо умозрительно, используя гипотезу или известную закономерность какого-либо явления. При этом второе, теоретическое, моделирование требует последующей опытной проверки.
Особенно полезно теоретическое моделирование там, где провести эксперимент невозможно или сложно.
«Проигрывание» на ЭВМ математической модели биологического процесса, трудно воспроизво ди мого в эксперименте, позволяет предвидеть изменение процесса в зависимости от условий, предсказать некоторые новые явления. Так, исследование модели сердечной деятельности, основанной на теории релаксационных колебаний, позволило предсказать особое нарушение сердечного ритма, впоследствии обнаруженного у человека.
В ряде случаев для физически разных моделей получают одинаковые дифференциальные уравнения. Так, например, одинаковые урав-
нения описывают затухающие механические [см. (7.33)] и электрические [см. (18.13)] колебания или апериодический разряд конденсатора [см. (18.17)], поглощение света веществом [(см. ф. (29.6)] и закон радиоактивного распада [см. (32.8)]. В этой аналогичности дифференциальных уравнений, относящихся к различным явлениям, можно усмотреть единство природы. Такая особенность позволяет использовать аналогии при математическом моделировании, а соответствующие модел и называют предметно-математическими моделями прямой аналогии.
Изучение явлений с помощью математических моделей подразделяется на четыре этапа.
Первый этап состоит в выделении объектов моделирования и формулировании законов, их связывающих. Он завершается записью в математических терминах представлений о связях между объектами модели.
На втором этапе происходит исследование математических задач, вытекающих из математической модели. Целью этого этапа является решение прямой задачи, т.е. получение данных, которые можно сравнить с результатами опыта или наблюдений. Для решения поставленных задач используются математический аппарат и вычислительная техника, позволяющая получить количественную информацию.
Третий этап позволяет выяснить, насколько выдвинутая гипотетическая модель удовлетворяет критерию практики. Решение этого вопроса связано с соответствием теоретических следствий экспериментальным результатам. В рамках этого этапа часто решается обратная задача, в которой определяются не известные ранее некоторые характеристики модели по результатам сопоставления выходной информации с результатами наблюдений.
Предложенная модель непригодна, если ни при каких значениях ее характеристик нельзя согласовать выходную информацию с экспериментом.
В четвертый этап входит анализ модели в результате накопления данных о ней и ее модернизация.
В зависимости от характера моделей их условно делят на феноменологические и структурные.
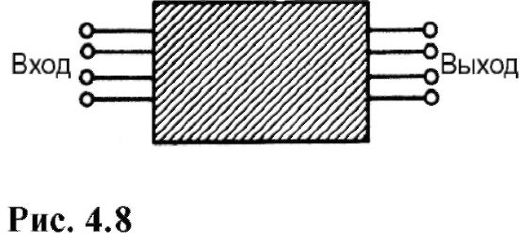
Феноменологические (функциональные) модели отражают временные и причинно-следственные отношения между параметрами, характеризующими функции биологического объекта без учета его структуры.
Объект рассматривается как «черный ящик» - система, в которой внешнему наблюдателю доступны лишь входные и выходные величины, а внутренняя структура неизвестна (рис. 4.8). Метод «черного ящика»
широко применяют для решения задач моделирования сложных кибернетических систем в тех случаях, когда интерес представляет поведение системы. Так, например, учитывая сложную «конструкцию» мозга человека и риск прямого приборного внедрения в его структуры, резонно исследовать мозг как «черный ящик»). Это можно делать, исследуя умственные способности человека, его реакцию на звук, свет и т.д.
Структурные модели строятся с учетом структуры объекта, отражающей его иерархические уровни.
При этом к структуре относят частные функции отдельных подсистем. Такие модели лучше выражают сущность биологических систем, но сложны для вычислений.
Составление моделей проводится по определенной схеме. Вначале формулируется цель моделирования, затем высказывается гипотеза, представляющая качественное описание системы, выбираются тип модели и математические методы ее описания в зависимости от цели и рода информации.
Заключительный этап состоит в создании модели и сравнении ее с системой-объектом с целью идентификации.
4.6. ПОНЯТИЕ О БИОЛОГИЧЕСКОЙ И МЕДИЦИНСКОЙ КИБЕРНЕТИКЕ
Биологическая кибернетика представляет собой научное направление, в котором идеи, методы и технические средства кибернетики применяются к рассмотрению задач биологии и физиологии.
Биологическая кибернетика может быть представлена теоретической и практической частью. Основной задачей теоретической биологической кибернетики является изучение общих вопросов управления, хранения, переработки и передачи информации в живых системах. Одним из важнейших методов практической биологической кибернетики является метод моделирования - моделирование структуры и поведения биологических систем. В развитие этого метода биологическая кибернетика включает и вопросы конструирования искусственных систем, воспроизводящих деятельность отдельных органов, их внутренние связи и внешние взаимодействия. В этом направлении биологическая кибернетика смыкается с медицинской.
Медицинская кибернетика является научным направлением, связанным с использованием идей, методов и технических средств кибернетики в медицине и здравоохранении. Условно медицинскую кибернетику можно представить следующими группами.
1. Вычислительная диагностика заболеваний. Эта часть в основном связана с использованием вычислительных машин для постановки диагноза.
Структура любой диагностической системы состоит из медицинской памяти (совокупный медицинский опыт для данной группы заболеваний) и логического устройства, позволяющего сопоставить симптомы, обнаруженные у больного опросом и лабораторным обследованием, с имеющимся медицинским опытом. Этой же структуре следует и диагностическая вычислительная машина.
Первым шагом является разработка методик формального описания состояния здоровья пациента, проводят тщательный анализ по уточнению клинических параметров и признаков, используемых в диагностике. Отбирают главным образом те признаки, которые допускают количественную оценку.
Кроме количественного выражения физиологических, биохимических и других характеристик больного для вычислительной диагностики необходимы сведения о частоте (априорной вероятности) клинических синдромов и диагностических признаков, об их классификации, зависимости, об оценке диагностической эффективности признаков и т.п. Все эти данные хранятся в памяти машины.
Следующим шагом является выбор алгоритма. Машина сопоставляет симптомы больного с данными, заложенными у нее в памяти.
Логика вычислительной диагностики соответствует логике врача, устанавливающего диагноз: совокупность симптомов сопоставляется с предшествующим опытом медицины.
Новую (неизвестную) болезнь машина не установит. Врач, встретивший неизвестное заболевание, сможет описать его признаки. Подробности такого заболевания можно установить, лишь проводя специальные исследования. ЭВМ в таких исследованиях сможет играть вспомогательную роль.
2. Кибернетический подход к лечебному процессу. Установив диагноз, врач назначает и проводит лечение, которое, как правило, не сводится к одноразовому воздействию. Это сложный процесс, во время которого врач вновь и вновь получает медико-биологическую информацию о больном, анализирует эту информацию и в соответствии с ней уточняет, изменяет, прекращает или продолжает лечебное воздействие.
Для кибернетических систем характерно целенаправленное воздействие управляющей системы на объект управления (см. 4.4).
Врач управляет больным, система врач-больной является кибернетической, поэтому кибернетический подход возможен и к лечебному процессу. Однако, несмотря на такие возможности, пока еще проникновение идей, методов и технических средств кибернетики в эту, главнейшую, часть медицины достаточно скромно.
В настоящее время кибернетический подход к лечебному процессу облегчает работу врача, позволяет эффективнее проводить лечение тяжелобольных, своевременно принять меры при осложнениях во время операции, разработать и контролировать процесс лечения медикаментами, создавать биоуправляемые протезы.
Кратко остановимся на возможностях применения такого подхода.
Контроль за состоянием организма человека необходим во многих областях человеческой деятельности (спортивной, производственной, учебной, военной), но особенно важен он в стрессовых ситуациях или в таких лечебных условиях, как, например, хирургические вмешательства с применением искусственного кровообращения, дыхания, при реанимации, в состоянии наркоза и т.п.
Для этих целей создаются информационные системы оперативного врачебного контроля (ИСОВК), которые осуществляют съем медико-биологической информации, автоматическое распознавание функционального состояния пациента, фиксацию нарушений в деятельности организма, диагностирование заболевания, управление устройствами, регулирующими жизненно важные функции.
В задачи оперативного врачебного контроля входят наблюдение за состоянием тяжелобольных с помощью систем слежения (мониторных систем), наблюдение за состоянием здоровых людей, находящихся в экстремальных условиях (стрессовые состояния, невесомость, гипербарические условия, среда с пониженным содержанием кислорода и т.п.).
Реализация принципа интенсивного ухода возможна в результате создания комплекса, позволяющего автоматически непрерывно контролировать состояние больного и сообщать о его изменениях.
Особенно важно получать быстрые и точные сведения о состоянии больного во время операции. В процессе операции фиксируется огромное количество (около 1000) различных параметров, характеризующих состояние больного. Проанализировать и проследить за таким количеством параметров в чрезвычайно короткие сроки для врача практически невозможно. В этих случаях на помощь приходит ЭВМ, тем более что при использовании ЭВМ в нее можно заранее вложить предшествующие
записи из истории болезни, сведения о наличии медикаментов, указания мер, которые необходимо предпринять в критических ситуациях.
Общие данные об оперируемых больных вводятся в ЭВМ заранее. Ввод данных о текущем состоянии производится с момента поступления больного в операционную. Кроме сведений о состоянии больного вводятся сведения о времени, виде и дозе анестезии и медикаментов и начинается непрерывная фиксация медико-биологических параметров. В результате, если какие-либо показатели будут выходить за критические значения, ЭВМ сообщит в виде звуковых или световых сигналов об опасности, выдаст на регистрирующее устройство информацию, объясняющую причины тревоги, и рекомендации по их устранению.
Еще одной возможностью применения кибернетики в медицине является математическое моделирование лечебного процесса, которое может служить основой для расчета оптимальных лечебных воздействий. Так, например, удается рассчитать процесс введения лекарственного препарата в организм больного, с тем чтобы вызвать наилучший лечебный эффект.
Кибернетический подход реализуется при создании сложных протезов, заменяющих некоторые органы. Поясним это примером.
Исследование биотоков мышц показало, что из-за возможности их съема непосредственно на мышцах удается определить информацию, посылаемую к мышцам (исполнительным, управляемым органам) центральной нервной системой (управляющей системой). Было установлено также, что биотоки могут возникать в мышце при команде центральной нервной системы и без выполнения команды, например в случае отсутствия конечности или ее части.
Эти свойства биотоков мышц позволили разработать активные протезы конечностей. Обычный протез, например ноги, восстанавливал лишь часть функции - опору, функция управления и координации в нем отсутствовала.
Разработаны протезы конечностей с биоэлектрическим управлением. Для управления такими конечностями разработаны специальные системы, в которые входят устройства съема биопотенциалов, усилитель и преобразователь, усиливающий сигнал и трансформирующий его в форму, пригодную для управления механической частью протеза (электродвигатели, редукторы и т.п.) и приведения в движение собственно протеза (кисть руки, пальцы, стопа ноги и т.д.).
С помощью преобразователей (датчиков), воспринимающих внешние воздействия на искусственный орган, осуществляется обратная связь: электрический сигнал с преобразователя трансформируется в сиг-
нал, подобный импульсам в воспринимающих нервах живого организма, и посылается от периферии к центру через неповрежденные участки кожи больной конечности.
3. Автоматизированные системы управления и возможности применения их для организации здравоохранения. В предыдущих разделах в основном делался акцент на процессы управления в биологических системах. Однако в своем первородном варианте термин «управление» больше си-нонимизировался с понятием «руководство» и относился к управлению хозяйством, предприятием, т.е. коллективом людей, выполняющих определенную цель. Такое понимание управления, разумеется, также является кибернетическим и, следовательно, процесс управление-руководство может быть оптимизирован с использованием методов и технических средств кибернетики.
Такая оптимизация привела к созданию в народном хозяйстве автоматизированных систем управления (АСУ). АСУ отличается от традиционных форм управления тем, что в них широко используют вычислительную технику для сбора и переработки информации, а также новые организационные принципы для реализации наиболее эффективного управления соответствующим объектом (системой).
Объекты управления АСУ различны как по своим масштабам, так и по назначению: участок цеха, кабинет врача, приемное отделение, предприятие, школа, больница, здравоохранение, отрасль промышленности, народное хозяйство страны и т.д.
В зависимости от уровня иерархии АСУ подразделяют на отдельные системы. Так, например, практически в любой отрасли хозяйства можно выделить отраслевую автоматизированную систему управления (ОАСУ).
Здравоохранение есть отрасль народного хозяйства, поэтому для управления этой отраслью была создана ОАСУ «Здравоохранение».
Не вдаваясь в детали такой ОАСУ, что является задачей специального курса в медицинском вузе, отметим лишь ее некоторые особенности.
Любые ОАСУ могут строиться на основе моделей, которые учитывают не только связи внутри данной отрасли, но и межотраслевые связи, т.е. взаимоотношение данной системы со всем народным хозяйством. Применительно к ОАСУ «3дравоохранение» модель должна включать как блок управления, так и другие элементы: профилактику, лечение (с диагностикой), медицинскую науку, кадры, материальное обеспечение.
Каждый из перечисленных элементов (блоков) ОАСУ связан как с элементами этой же системы, так и с другими системами. Проиллюстрируем это на примере профилактики заболеваний. Она включает иммунизацию населения, массовые медицинские осмотры, медицинское
просвещение и др. Массовые медицинские осмотры связаны с наличием подготовленных врачебных кадров, обеспеченностью аппаратурой и др. (внутренние связи и зависимости), состоянием и развитием промышленных предприятий, размещением населения по географическим зонам и др. (внешние связи, выходящие за пределы данной ОАСУ).
В первоочередные задачи ОАСУ «3дравоохранение» входят автоматизация процессов сбора и анализа статистической информации по основным направлениям медицинской деятельности и решение вопросов оптимизации некоторых процессов управления.